
Cánh tay robot là gì? Ứng dụng của cánh tay robot trong công nghiệp
Cánh tay robot không chỉ giúp tự động hóa các quy trình trong nhà máy, mà còn đẩy nhanh tiến độ sản xuất, nâng cao năng suất lao động. Hãy cùng tìm hiểu các loại cánh tay robot cũng như các ứng dụng phổ biến qua bài viết sau đây!
Nội dung bài viết:
1. Cánh tay robot là gì?
2. Các thành phần của cánh tay robot và nguyên lý hoạt động
3. Các loại cánh tay robot trong công nghiệp
4. Ứng dụng của cánh tay robot
5. Dây cáp điện dùng cho cánh tay robot
Dòng cáp ROBOFLEX®
Dây cáp ethernet và cáp BUS
1. Cánh tay robot là gì?

Cánh tay robot là thiết bị được thiết kế để thực hiện các nhiệm vụ một cách nhanh chóng, chính xác và hiệu quả. Chúng thường được vận hành bằng động cơ, bao gồm nhiều khớp nối, bộ phận xoay và cơ cấu điều khiển, giúp tự động hóa các quy trình nặng nhọc hoặc lặp đi lặp lại với tốc độ và độ chính xác cao. Nhờ đó, cánh tay robot đặc biệt hữu ích trong các ngành sản xuất công nghiệp, gia công cơ khí, chế tạo và lắp ráp.
Trong các nhà máy, cánh tay robot được sử dụng để tự động hóa các công việc lặp đi lặp lại, chẳng hạn như phun sơn lên thiết bị hoặc linh kiện. Trong kho hàng, robot điều khiển hỗ trợ việc sắp xếp và phân loại hàng hóa từ băng chuyền để xử lý đơn đặt hàng. Trong nông nghiệp, cánh tay robot có thể thu hoạch trái cây chín và đặt vào khay lưu trữ một cách chính xác.
Với sự tiến bộ của công nghệ và chi phí sản xuất linh kiện robot ngày càng giảm, cánh tay robot và robot công nghiệp đã trở nên phổ biến và dễ tiếp cận hơn trong nhiều lĩnh vực, từ các nhà máy lớn đến các doanh nghiệp vừa và nhỏ.
>>Xem thêm: Cobot là gì? Ứng dụng của cobot trong công nghiệp
2. Đặc điểm của cánh tay robot
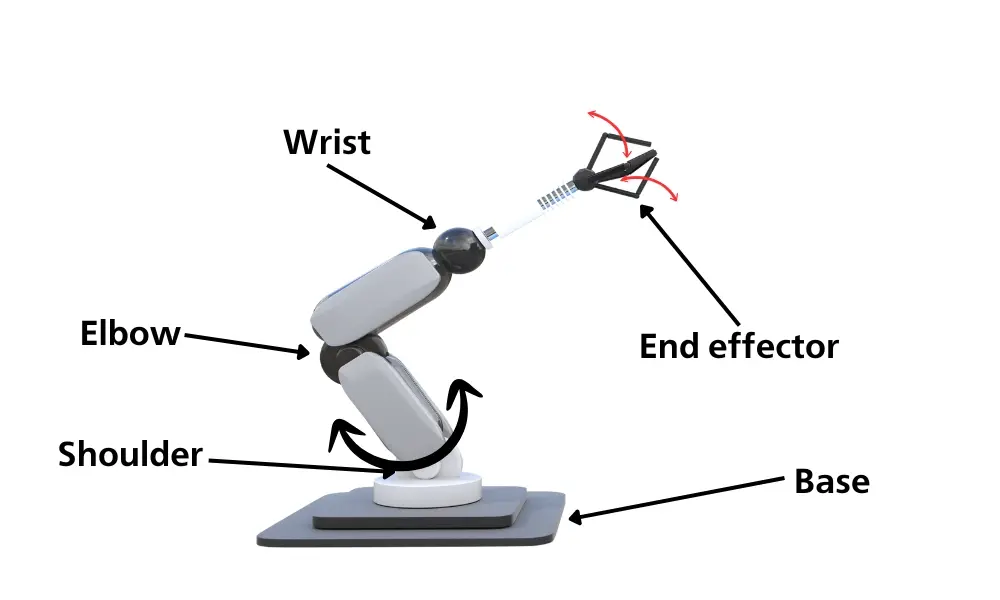
Một số thành phần của cánh tay robot
2.1 Cấu tạo của cánh tay robot
Cánh tay robot bao gồm nhiều bộ phận khác nhau, phối hợp nhịp nhàng để đảm bảo hoạt động chính xác, hiệu quả, góp phần nâng cao năng suất trong sản xuất:
- Bộ điều khiển (Controllers): đóng vai trò như bộ não của cánh tay robot, xử lý và điều phối mọi hoạt động. Chúng có thể được lập trình để hoạt động tự động hoặc vận hành thủ công.
- Cánh tay (Arms): gồm ba bộ phận chính: vai, khuỷu tay và cổ tay. Vai là phần gốc của cánh tay, thường gắn với bộ điều khiển. Nó có thể di chuyển về phía trước, phía sau hoặc xoay. Khuỷu tay nằm ở giữa, giúp phần trên của cánh tay có thể di chuyển độc lập với phần dưới. Cổ tay nằm ở đầu cánh tay, kết nối với bộ phận gắp để thực hiện thao tác cuối cùng.
- Bộ phận gắp (End effector): Bộ phận gắp đóng vai trò như bàn tay của cánh tay robot. Nó thường có hai hoặc ba ngón kẹp, có thể mở và đóng linh hoạt theo yêu cầu. Một số loại còn có khả năng xoay trên cổ tay, giúp việc thao tác vật liệu và thiết bị trở nên dễ dàng hơn.
- Động cơ truyền động: điều khiển chuyển động giữa các khớp của cánh tay robot.
- Cảm biến: Những cánh tay robot hiện đại thường được trang bị cảm biến để tăng khả năng tương tác với môi trường xung quanh. Ví dụ, cảm biến giúp robot tránh va chạm với các robot khác trong cùng khu vực hoặc điều chỉnh lực kẹp để không làm hỏng các vật liệu mong manh.
Bộ phận gắp ở cuối cánh tay thực hiện các thao tác theo lập trình như: gắp và di chuyển vật thể; hàn, sơn hoặc lắp ráp linh kiện; khoan cắt, mài hoặc đánh bóng
2.2 Nguyên lý hoạt động của cánh tay robot
Cánh tay robot công nghiệp thực hiện lặp lại các nhiệm vụ theo đúng lập trình. Dưới đây là cách chúng vận hành:
- Lập trình nhiệm vụ: Bước đầu tiên là xác định nhiệm vụ mà robot cần thực hiện. Kỹ sư lập trình sẽ tạo ra một chương trình quy định chuyển động, tốc độ và thao tác của bộ phận gắp ở cuối cánh tay robot.
- Điều khiển: Chương trình này được nạp vào bộ điều khiển của robot, đóng vai trò như bộ não trung tâm. Bộ điều khiển này là một máy tính chuyên dụng, có nhiệm vụ giải mã chương trình và gửi lệnh đến các bộ phận khác nhau của cánh tay robot.
- Chuyển động: Bộ điều khiển sẽ truyền tín hiệu đến các động cơ ở từng khớp nối của cánh tay robot. Tùy vào kích thước và nhu cầu vận hành, robot có thể sử dụng động cơ điện, thủy lực hoặc khí nén để tạo ra lực di chuyển cần thiết. Khi động cơ hoạt động, các khớp nối xoay theo lập trình, giúp cánh tay di chuyển chính xác.
- Cảm biến phản hồi và điều chỉnh: Cánh tay robot được trang bị cảm biến theo dõi vị trí và chuyển động theo thời gian thực. Nếu phát hiện sai lệch so với chương trình, bộ điều khiển sẽ ngay lập tức điều chỉnh tín hiệu truyền đến động cơ, giúp cánh tay trở về đúng quỹ đạo. Hệ thống vòng phản hồi (feedback loop) này đảm bảo robot luôn hoạt động chính xác và ổn định.
- Thao tác của bộ phận gắp: Bộ phận gắp ở cuối cánh tay thực hiện các thao tác theo lập trình như: gắp và di chuyển vật thể; hàn, sơn hoặc lắp ráp linh kiện; khoan cắt, mài hoặc đánh bóng.
3. Các loại cánh tay robot trong công nghiệp
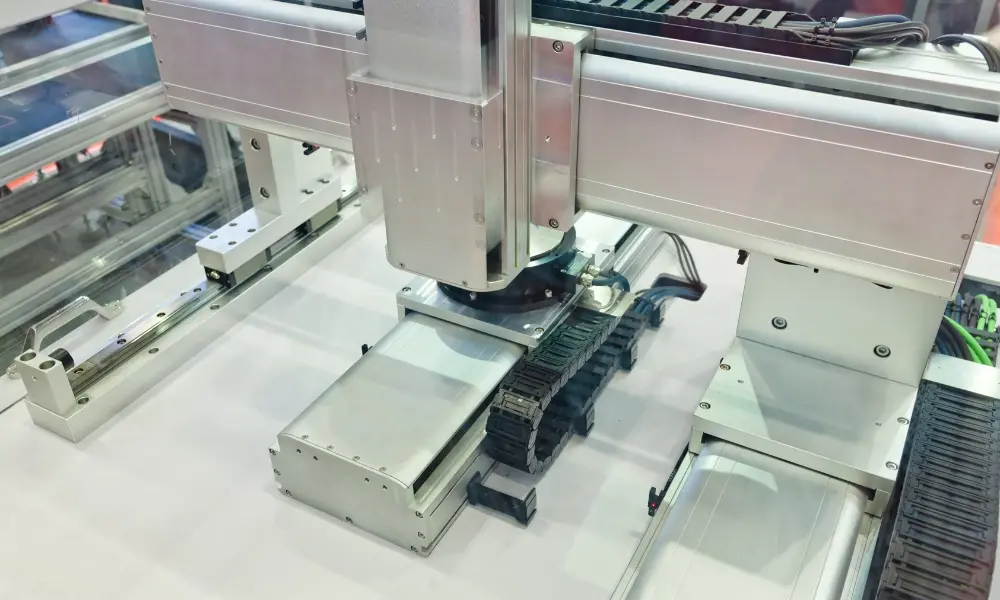
Cánh tay robot Cartesian
Hiện nay, có rất nhiều loại cánh tay robot khác nhau, mỗi loại được thiết kế với chức năng và đặc điểm riêng, phù hợp với từng ngành công nghiệp cụ thể. Dưới đây là một số loại phổ biến nhất:
3.1 Robot tọa độ Cartesian (robot tuyến tính)
Đây là loại robot điều khiển được đặt theo hệ tọa độ Descartes (X, Y, Z) và thường được gọi là robot hình chữ nhật hoặc robot 3 trục. Các cánh tay robot Descartes vận hành công cụ hoặc phụ kiện thông qua chuyển động tuyến tính để thay đổi vị trí trong ba chiều. Chúng thực hiện điều này bằng cách sử dụng nhiều loại động cơ và bộ truyền động tuyến tính.
3.2 Robot hình trụ
Cánh tay robot hình trụ có các trục tạo thành hệ tọa độ hình trụ; nói cách khác, các chuyển động được lập trình trước của chúng diễn ra trong một môi trường hình trụ (lên, xuống và xoay xung quanh). Các khớp quay và trượt trên loại cánh tay này cho phép nó di chuyển cả theo hướng tuyến tính và xoay tròn trong các công đoạn lắp ráp, hàn điểm và xử lý dụng cụ máy móc.

Cánh tay robot SCARA
3.3 Robot cộng tác (cobot)
Robot cộng tác là một loại tự động hóa robot được thiết kế để hoạt động an toàn bên cạnh nhân viên con người. Thiết kế của robot cộng tác rất khác so với robot công nghiệp. Robot cộng tác chủ yếu được thiết kế với mục tiêu an toàn, vì vậy chúng có các cạnh tròn, giới hạn lực và tải trọng thấp. Hầu hết các robot cộng tác đều có nhiều cảm biến để ngăn ngừa tai nạn với nhân viên con người và có các quy trình an toàn để tắt máy nếu xảy ra bất kỳ sự tương tác không mong muốn nào.
3.4 Robot SCARA
Robot SCARA (Selective Compliance Assembly Robot Arm) đề cập đến khả năng của chúng trong việc duy trì độ cứng ở một số trục nhất định, trong khi vẫn đảm bảo mức độ linh hoạt của robot điều khiển. Vì khả năng linh hoạt có chọn lọc, cánh tay robot SCARA được sử dụng cho các dây chuyền sản xuất công nghệ cao.

Cánh tay robot có khớp nối
3.5 Robot hình cầu (robot cực)
Loại robot này hoạt động trong một không gian làm việc hình cầu. Để thực hiện điều này, nó sử dụng một khớp xoay kết hợp, hai khớp quay và một khớp tuyến tính. Cánh tay robot cực có một khớp xoay kết nối nó với đế, và nhờ vào không gian làm việc hình cầu mà nó có thể tiếp cận, nó có thể thực hiện các công việc mà cánh tay robot hình trụ không thể làm được, bao gồm vận hành dụng cụ máy móc, hàn điểm, đúc khuôn và hàn hồ quang.
3.6 Cánh tay robot có khớp nối
Nhờ vào lợi thế cơ học, đây là loại robot công nghiệp phổ biến và bền vững nhất, do đó được sử dụng rộng rãi trong công nghiệp. Chuyển động chính xác kết hợp với phạm vi xoay rộng và khả năng vươn xa theo chiều tuyến tính trong thiết kế cánh tay là những ưu điểm nổi bật của loại robot này.
Robot sáu trục là loại cánh tay robot có khớp nối phổ biến nhất, và cũng là loại robot công nghiệp phổ biến nhất hiện nay. Nhờ vào tính linh hoạt của mình, đây là loại cánh tay robot đa năng, được lựa chọn cho nhiều ứng dụng. Robot sáu trục là loại robot công nghiệp dễ nhận biết nhất.
4. Ứng dụng của cánh tay robot trong công nghiệp
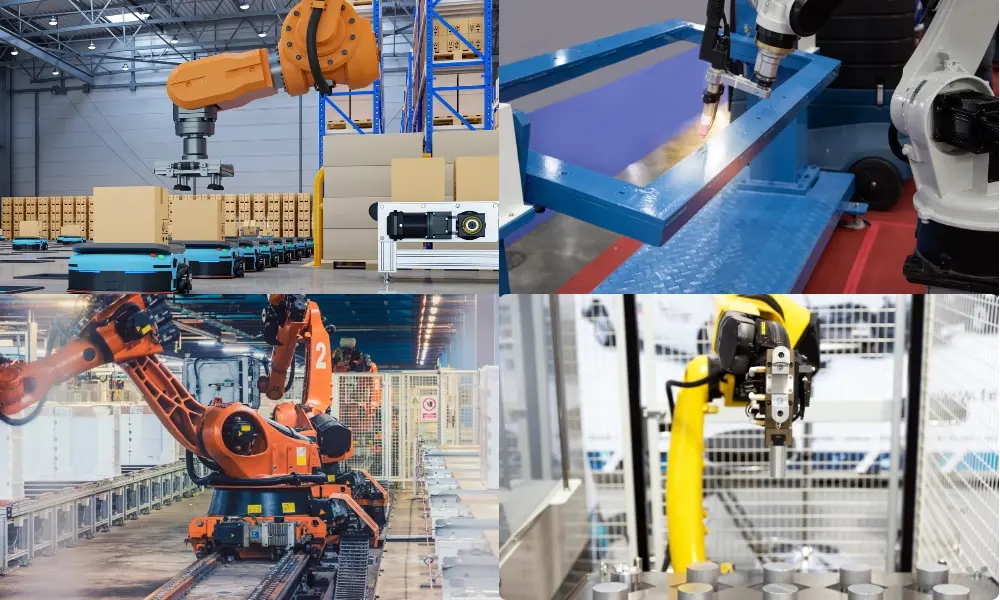
Một số ứng dụng của cánh tay robot
Một trong những lợi thế chính của cánh tay robot là tính linh hoạt của chúng trong việc hỗ trợ nhiều ứng dụng khác nhau, từ những công việc đơn giản đến những công việc phức tạp nhất trong những môi trường an toàn hoặc khắc nghiệt nhất. Dưới đây là một số cách phổ biến mà các nhà sản xuất đang sử dụng cánh tay robot hiện nay:
- Đóng pallet: Cánh tay robot có thể được sử dụng để tự động hóa quá trình đặt hàng hóa hoặc sản phẩm lên pallet. Bằng cách tự động hóa quy trình này, việc đóng pallet trở nên chính xác hơn, hiệu quả về chi phí.
- Xử lý vật liệu: Cánh tay robot xử lý vật liệu có thể giúp tạo ra một kho hàng an toàn và hiệu quả bằng cách đảm bảo hàng hóa và vật liệu được lưu trữ đúng cách, dễ tìm kiếm và vận chuyển chính xác. Việc tự động hóa các quy trình này có thể giúp tăng tốc độ giao hàng, tăng năng suất làm việc.
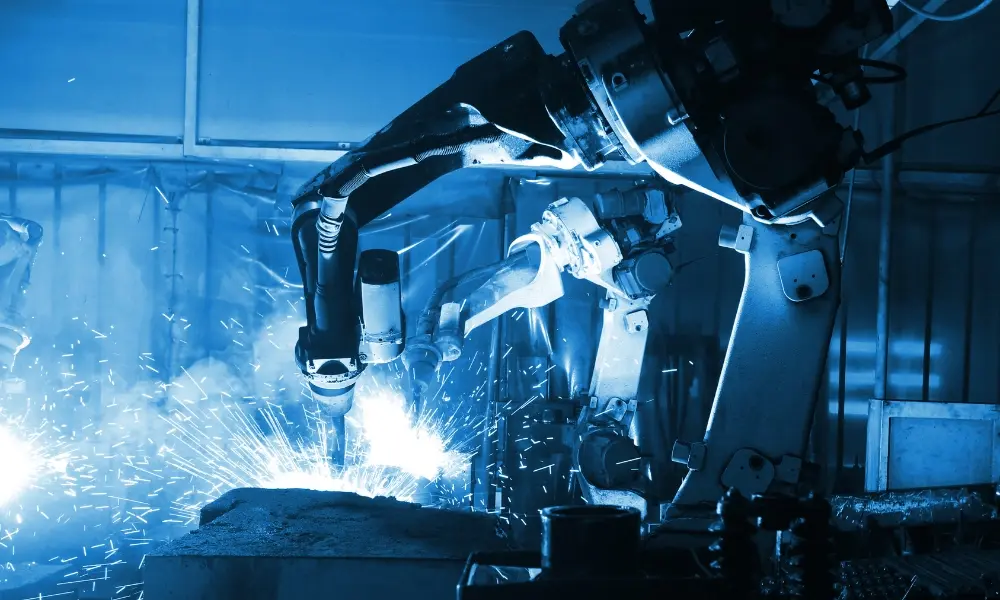
- Hàn: Hàn là một công việc có thể được thực hiện bởi robot trong các môi trường công nghiệp tiên tiến như sản xuất ô tô. Với tác động quan trọng đối với chất lượng sản phẩm, hàn là một ứng dụng tuyệt vời cho robot tiên tiến kết hợp với hệ thống tầm nhìn và AI để kiểm tra chất lượng trong quá trình sản xuất.
- Kiểm tra: Việc thực hiện kiểm tra chất lượng thường được hoàn thành ở cuối dây chuyền sản xuất, điều này làm chậm việc phát hiện các vấn đề chất lượng sản phẩm. Bằng cách trang bị cho robot các hệ thống tầm nhìn và AI, các doanh nghiệp có thể hưởng lợi từ việc kiểm tra thời gian thực, giúp giảm thiểu lãng phí và thời gian ngừng hoạt động.
- Lấy và đặt (Pick and Place): Robot lấy và đặt thường được sử dụng trong sản xuất và logistics hiện đại. Chúng được trang bị hệ thống tầm nhìn máy tính tiên tiến để nhận diện đối tượng, nắm bắt và di chuyển từ vị trí này sang vị trí khác một cách nhanh chóng và hiệu quả.
5. Vai trò của dây cáp điện đối với cánh tay robot
5.1 Đặc điểm của dây cáp điện cho các ứng dụng cánh tay robot
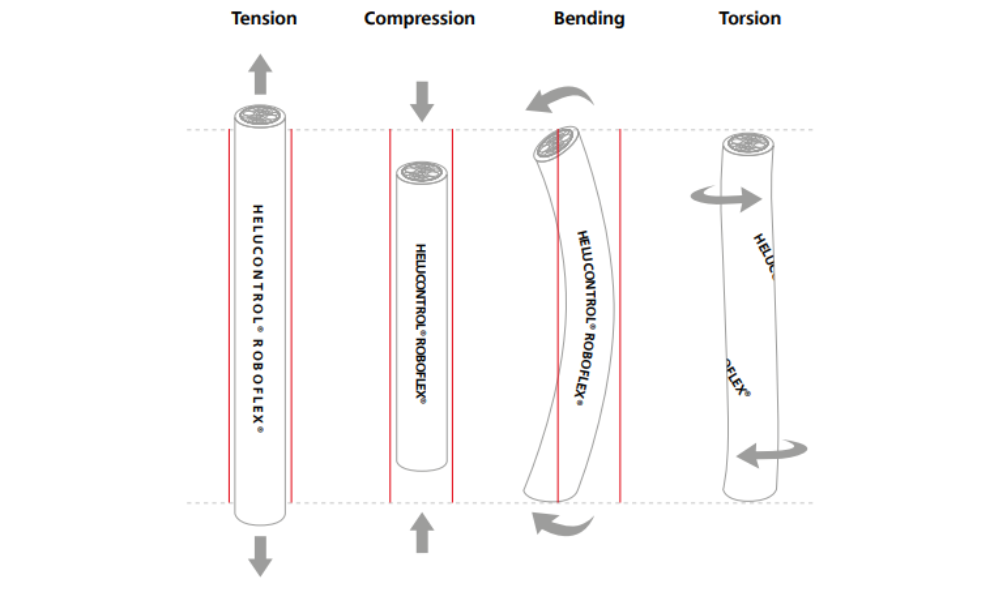
Môi trường ứng dụng của các loại cánh tay robot đặt ra thách thức riêng cho các loại dây cáp điện và phụ kiện cáp. Để đảm bảo khả năng vận hành tốt và hoạt động hiệu quả, các loại dây cáp điện cần phải:
- Tăng tốc và giảm tốc nhanh chóng.
- Có khả năng chịu được chuyển động xoắn, uốn cong, tải trọng kéo và các điều kiện khác.
- Có khả năng chịu được môi trường hoạt động có nhiệt độ cực đoan và tiếp xúc với bụi, đất, độ ẩm và hóa chất.
- Ứng suất cơ học, cũng như các yếu tố hóa học và nhiệt độ
>>Xem thêm: Đặc điểm của dây cáp điện chống xoắn cho ứng dụng robot
5.2 Dây cáp điện HELUKABEL ROBOFLEX® cho cánh tay robot
Danh mục sản phẩm dây cáp cho ứng dụng cánh tay robot của HELUKABEL bao gồm cáp điều khiển và cáp động cơ với nhiều kích thước khác nhau, cáp hybrid và cáp dành cho cảm biến, dữ liệu, cáp mạng và cáp bus.
ROBOFLEX® là dòng cáp chuyên dùng cho các ứng dụng cánh tay robot. Một số đặc điểm nổi bật bao gồm: đạt chứng nhận UL/CSA, khả năng chịu nhiệt lên đến 90°C, không chứa halogen…
| Dòng cáp | Điện áp danh định | Tải trọng xoắn/ chu kỳ | Chu kỳ uốn cong |
| Cáp dữ liệu HELUDATA® ROBOFLEX® PUR UL/CSA | Điện áp danh định UL (AWM) 300V | 5 triệu chu kỳ tại +/- 360°/m; 10 triệu chu kỳ tại +/- 180°/m | 10 triệu |
| Cáp dữ liệu HELUDATA® ROBOFLEX®-D PUR UL/CSA | 5 triệu chu kỳ tại +/- 180/m | 5 triệu | |
| Cáp dữ liệu HELUDATA® ROBOFLEX®-PAIR-D PUR UL/CSA | 5 triệu chu kỳ tại +/- 180/m | 5 triệu | |
| Cáp điều khiển HELUCONTROL® ROBOFLEX® PUR UL/CSA | Điện áp danh định UL (AWM) 600V | 5 triệu chu kỳ tại +/- 360°/m; 10 triệu chu kỳ tại +/- 180°/m | 10 triệu |
| Cáp điều khiển HELUCONTROL® ROBOFLEX® -D PUR UL/CSA | 5 triệu chu kỳ tại +/- 180/m | 5 triệu | |
| Cáp motor HELUPOWER® ROBOFLEX® PUR UL/CSA | Điện áp danh định UL (AWM) 1000V | 5 triệu chu kỳ tại +/- 360°/m; 10 triệu chu kỳ tại +/- 180°/m | 10 triệu |
| Cáp motor HELUPOWER® ROBOFLEX®-D PUR UL/CSA | 5 triệu chu kỳ tại +/- 180/m | 5 triệu | |
| Cáp hybrid HELUPOWER® ROBOFLEX® HYBRID PUR UL/CSA | Điện áp danh định UL (AWM) 1000V | 5 triệu chu kỳ tại +/- 360°/m; 10 triệu chu kỳ tại +/- 180°/m | 10 triệu |
| Cáp hybrid HELUPOWER® ROBOFLEX® HYBRID-D PUR UL/CSA | 5 triệu chu kỳ tại +/- 180/m | 5 triệu | |
| Cáp hàn HELUDATA® ROBOFLEX®-recycle PUR UL/CSA | Điện áp danh định UL (AWM) 300V | Lên đến 10 triệu chu kỳ tại +/- 360°/m | Lên đến 10 triệu |






5.3 Dây cáp ethernet và cáp bus cho ứng dụng robot
Ngoài dòng cáp ROBOFLEX®, một số sản phẩm cáp khác cũng được sử dụng cho cánh tay robot bao gồm:
| Dòng cáp | Đặc điểm |
| Cáp PROFInet Type R, torsion, PUR, Cat. 5e | Khả năng truyền dẫn xuất sắc, có lớp chống nhiễu kép |
| Cáp 100 T Tordierflex, SF/UTP, Cat. 5 | Hiệu suất vượt trội/khả năng dự trữ tốt ngay cả trong điều kiện khắc nghiệt |
| 600 S PROFInet torsion, SF/FTP, Cat. 7 | Thiết kế xoắn với cấu trúc chống nhiễu đặc biệt, tối ưu cho việc sử dụng cho ứng dụng robot |
| Profibus L2, torsion, highly flexible, PUR + PVC | Cấu trúc xoắn cho phép chịu được mô-men xoắn |
Nếu vẫn còn băn khoăn, đừng quên liên hệ ngay đội ngũ kỹ sư của HELUKABEL Việt Nam để được giải đáp chi tiết.
HELUKABEL® Vietnam
| Địa chỉ | 905 Nguyễn Kiệm, Phường 3, Quận Gò Vấp, Thành phố Hồ Chí Minh 700000 |
| info@helukabel.com.vn | |
| Hotline | +84 28 77755578 |
| Website | www.helukabel.com.vn |
| Khám phá và đặt mua các sản phẩm của chúng tôi trên | Tiki | Product finder |
| Kết nối với chúng tôi trên | Facebook | LinkedIn | Instagram | Youtube | Zalo | WhatsApp | Tiktok | Spotify |


